|
1
|
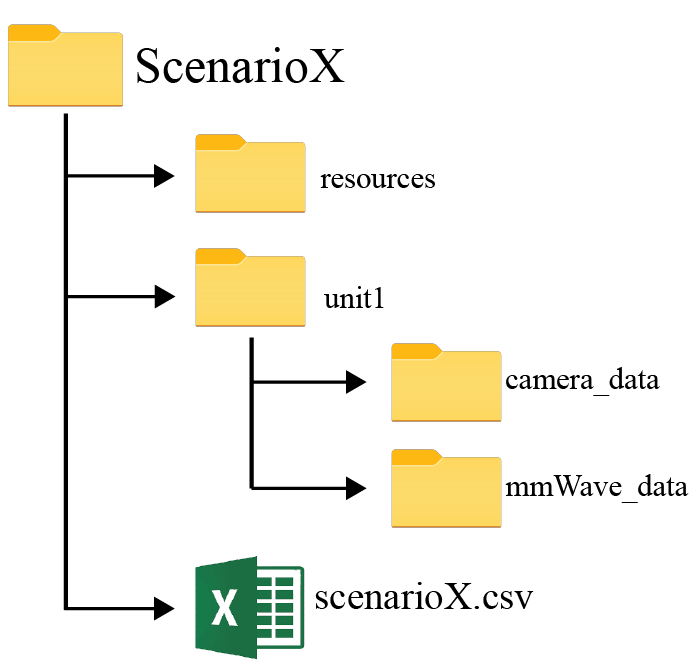
./unit1/camera_data/image_1.jpg
|
./unit1/mmWave_data/power_1.txt
|
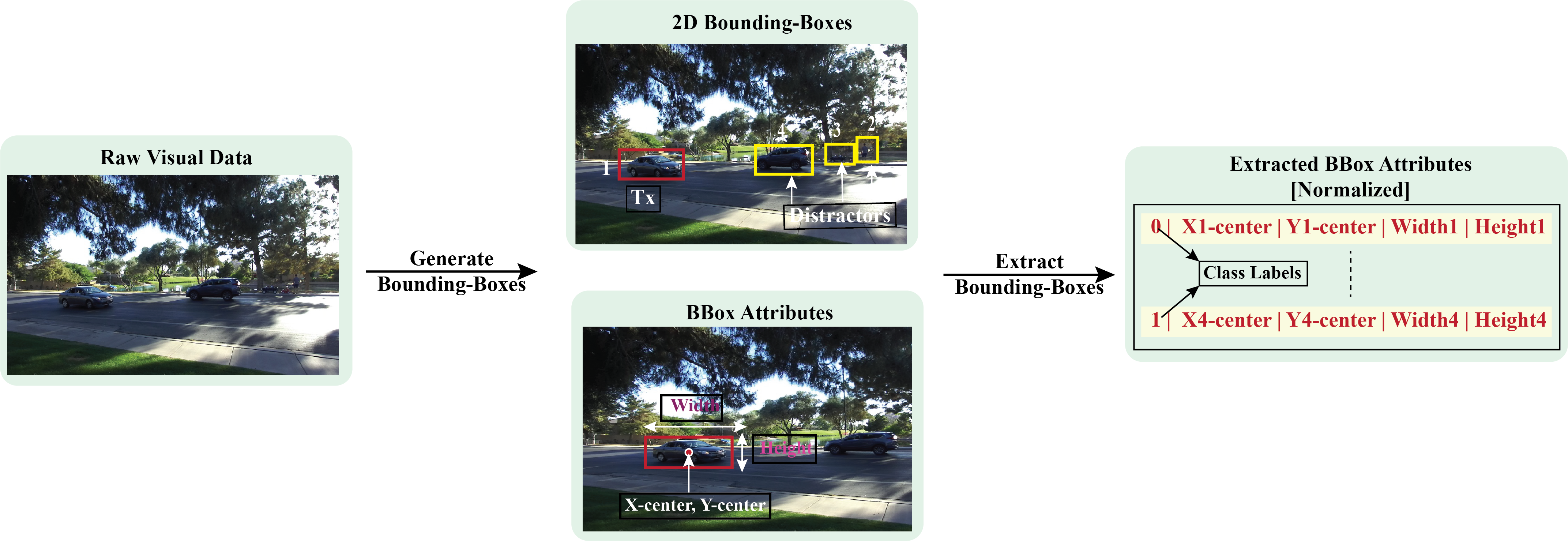
./resources/bbox/bbox_1.txt
|
45
|
|
2
|
./unit1/camera_data/image_3.jpg
|
./unit1/mmWave_data/power_3.txt
|
./resources/bbox/bbox_3.txt
|
36
|
|
3
|
./unit1/camera_data/image_5.jpg
|
./unit1/mmWave_data/power_5.txt
|
./resources/bbox/bbox_5.txt
|
22
|
|
4
|
./unit1/camera_data/image_6.jpg
|
./unit1/mmWave_data/power_6.txt
|
./resources/bbox/bbox_6.txt
|
5
|
|
5
|
./unit1/camera_data/image_8.jpg
|
./unit1/mmWave_data/power_8.txt
|
./resources/bbox/bbox_8.txt
|
62
|