
LiDAR-Aided Blockage Prediction
Leaderboard
| Date | Name | scenario 24 | scenario 25 | scenario 26 | scenario 27 | scenario 28 | scenario 29 |
|---|---|---|---|---|---|---|---|
| 1/15/2021 | Wireless Intelligence Lab ASU | Future-1: 87.50% Future-5: 90.00% Future-10: 85.31% | Future-1: 94.79% Future-5: 91.46% Future-10: 84.06% | Future-1: 89.80% Future-5: 86.53% Future-10: 81.53% | Future-1: 96.23% Future-5: 92.83% Future-10: 87.45% | Future-1: 91.25% Future-5: 88.75% Future-10: 79.38% | Future-1: 95.92% Future-5: 94.49% Future-10: 88.67% |
- This table documents the different proposed LiDAR-aided blockage prediction solutions. This provides a way to benchmark the performance of the proposed solutions.
- For the individual DeepSense scenarios (development datasets), we use the “Future-N” blockage prediction accuracy as the evaluation metric.
- For further details and information regarding the ML challenge and how to participate, please check the “ML Challenge“ section below.
License
If you want to use the dataset or scripts in this page, please cite the following two papers:
A. Alkhateeb, G. Charan, T. Osman, A. Hredzak, J. Morais, U. Demirhan, and N. Srinivas, “DeepSense 6G: A Large-Scale Real-World Multi-Modal Sensing and Communication Datasets,” IEEE Communications Magazine, 2023.
@Article{DeepSense,
author={Alkhateeb, Ahmed and Charan, Gouranga and Osman, Tawfik and Hredzak, Andrew and Morais, Joao and Demirhan, Umut and Srinivas, Nikhil},
title={DeepSense 6G: A Large-Scale Real-World Multi-Modal Sensing and Communication Dataset},
journal={IEEE Communications Magazine},
year={2023},
publisher={IEEE}}
S. Wu and A. Alkhateeb, “LiDAR-Aided Mobile Blockage Prediction in Real-World Millimeter Wave Systems,” IEEE Wireless Communications and Networking Conference (WCNC), 2022.
@INPROCEEDINGS{Wu2022,
author={Wu, Shunyao and Chakrabarti, Chaitali and Alkhateeb, Ahmed},
booktitle={2022 IEEE Wireless Communications and Networking Conference (WCNC)},
title={LiDAR-Aided Mobile Blockage Prediction in Real-World Millimeter Wave Systems},
year={2022},
pages={2631-2636},
doi={10.1109/WCNC51071.2022.9771651},}
Introduction
LOS link blockage is a challenge: Millimeter-wave (mmWave) and sub-terahertz communications are becoming the dominant directions for modern and future wireless networks. With their large bandwidth, they have the ability to satisfy the high data rate demands of several applications such as wireless Virtual/Augmented Reality (VR/AR) and autonomous driving. Communication in these bands, however, faces several challenges at both the physical and network layers. One of the key challenges stems from the sensitivity of mmWave and terahertz signal propagation to blockages. For this, these systems need to rely heavily on maintaining line-of-sight (LOS) connections between the base stations and users. The possibility of blocking these LOS links by stationary or dynamic blockages can highly affect the reliability and latency of mmWave/terahertz systems, which makes it hard for these systems to support highly-mobile and latency-sensitive applications.
Sensing aided blockage prediction is a promising solution: The key to overcoming the link blockage challenges lies in developing a critical sense of the surrounding. The dependence of mmWave/sub-THz communication systems on the line-of-sight links between the transmitter/receiver means that the awareness about their locations and the surrounding environment (geometry of the buildings, moving scatterers, etc.) could potentially help in predicting future blockages. For example, the sensory data collected from RGB cameras, LiDARs, Radars and GPS data can help in identifying probable transmitter and blockages in the wireless environment and understand their mobility patterns. These information can be utilized by the wireless network to proactively predict incoming blockages and in initiating hand-off beforehand. We call this approach sensing-aided blockage prediction and hand-off. LiDAR-aided blockage prediction is a special case when the basestation attempts to leverage the point-cloud map of the wireless environment captured by the LiDAR, to predict the future LOS link blockages proactively.
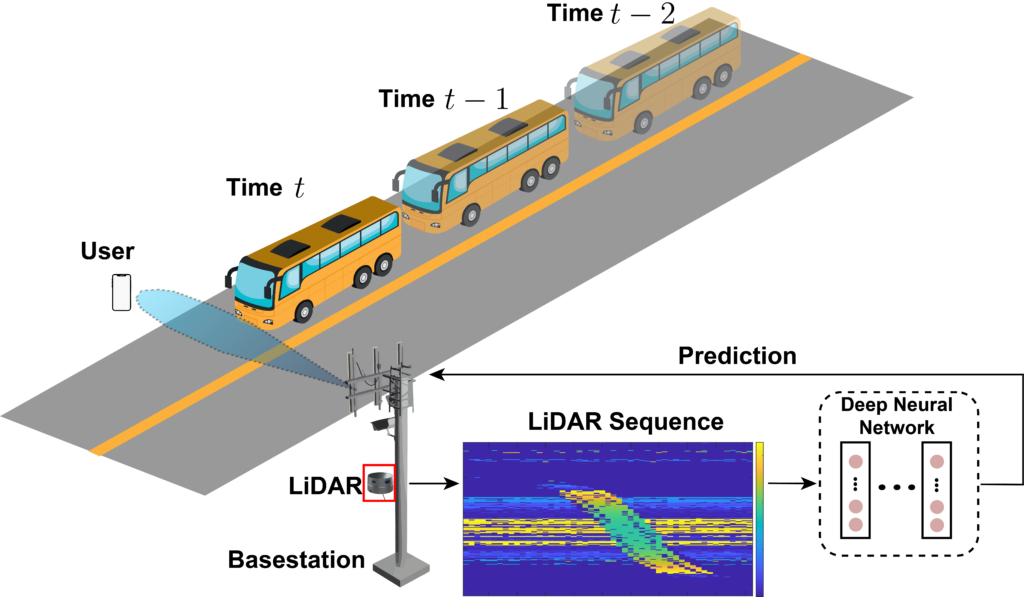
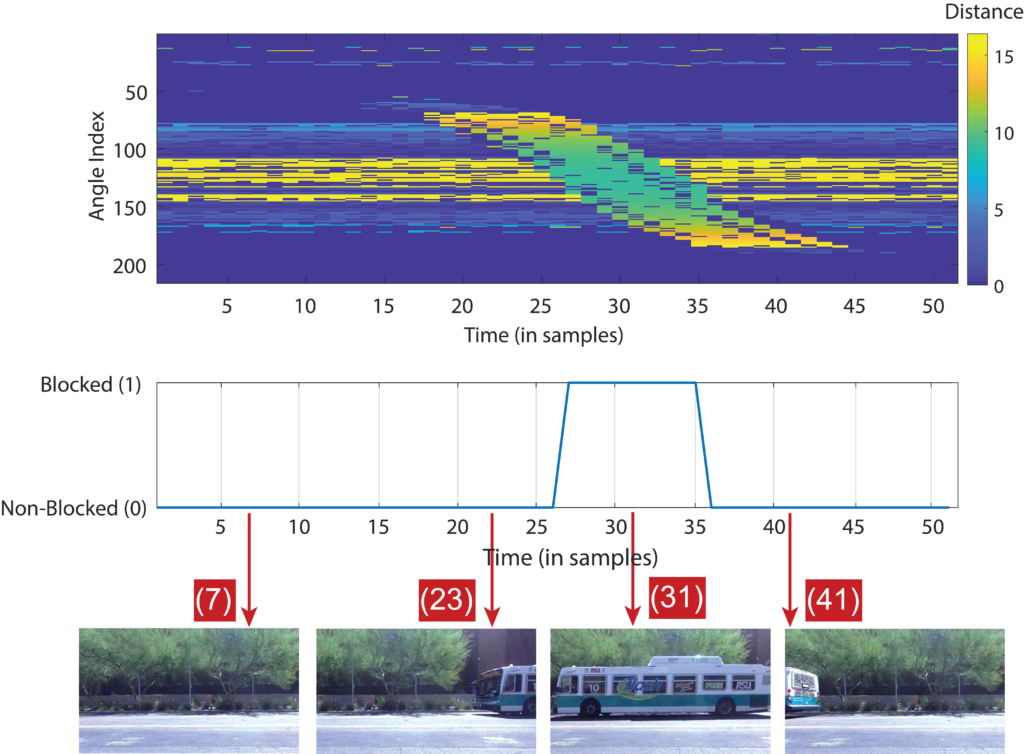
LiDAR pre-blockage signature can aid in proactive blockage prediction: A typical LiDAR sensor sends pulsed light waves into the surrounding environment. These pulses are reflected by the objects and returned to the sensor; and the sensor uses the round-trip time to calculate the distance it traveled. By sending and receiving laser beams, the LiDAR sensor collects a 2-D point cloud map of the surrounding environment. The figure below shows an example when a communication link is getting blocked by a moving object. The heatmap on the top represents the sensed distance for every quantized angle (direction) level as a function of time. The horizontal lines represent static objects (since their distances from the LiDAR device do not change over time). The middle plot shows the link status and the bottom photos show the corresponding scenario. Note that from time instance 13 to 26, the color of the pattern changes from yellow to green, indicating that the distance between the moving object (bus) and the LiDAR sensor has become shorter. Thus, as the blockage approaches the link, we can see a clear pre-blockage pattern in the LiDAR heatmap that can potentially be leveraged for blockage prediction.
LiDAR-aided blockage prediction: Specific Task Description
LiDAR-aided blockage prediction at the infrastructure is the task of predicting the future LOS link blockages proactively by utilizing a machine learning model and the 2D point-cloud map of the wireless environment captured by the LiDAR installed at the basestation.
Objective of the ML Task: At any time t, given a sequence of ‘r’ {t – r + 1, … , t} previous and current 2D point-cloud maps of the wireless environment captured (by the basestation), the primary objective of this task is to design a machine learning model that predicts the future link blockages. In general, the machine learning model is expected to return the blockage status in the future ‘k’ time-slots, i.e., {t + 1, … , t + k}. If there is any blockage during these slots, the blockage status for the ‘k’ time-slots (future-k) is considered as blocked. For ML model development, we provide a labeled dataset consisting of ordered sequence of LiDAR point-cloud maps (input to the ML model) and the ground-truth future blockage status. More details regarding the dataset is provided in the Dataset section below.

For further information regarding how LiDAR point-cloud maps can aid the beam prediction task, please refer to our paper here.
Task-Specific Dataset
DeepSense 6G: Developing efficient solutions for sensing-aided blockage prediction and accurately evaluating them requires the availability of a large-scale real-world dataset. With this motivation, we built the DeepSense 6G dataset, the first large-scale real-world multi-modal dataset with co-existing communication and sensing data.
In this LiDAR-aided blockage prediction task, we build development/challenge datasets based on the DeepSense data from scenarios [24 – 29].
For each scenario, we provide the following datasets:
- Development Dataset: It comprises of the sequence of LiDAR data and the corresponding ground-truth blockage status for k-future instances. The LiDAR data comprises of the 2D point-cloud maps of the wireless environment captured by the camera installed at the basestation. This task involves predicting for three different future instances, i.e., future-1, future-5, and future-10.
- Challenge Dataset: To motivate the development of efficient ML models, we propose a benchmark challenge. For this, we provide a Challenge dataset, consisting of only the input 2D point-cloud maps. The ground-truth labels are hidden from the users by design to promote a fair benchmarking process. To participate in this Challenge, check the ML Challenge section below for further details.
Below we explain how to access the development dataset.
Please login to download the DeepSense datasets
How to Access Task Data?
Step 1. Download All Scenarios Dataset
Step 2. Extract the VABT.zip file. Contains the scenario dataset folders
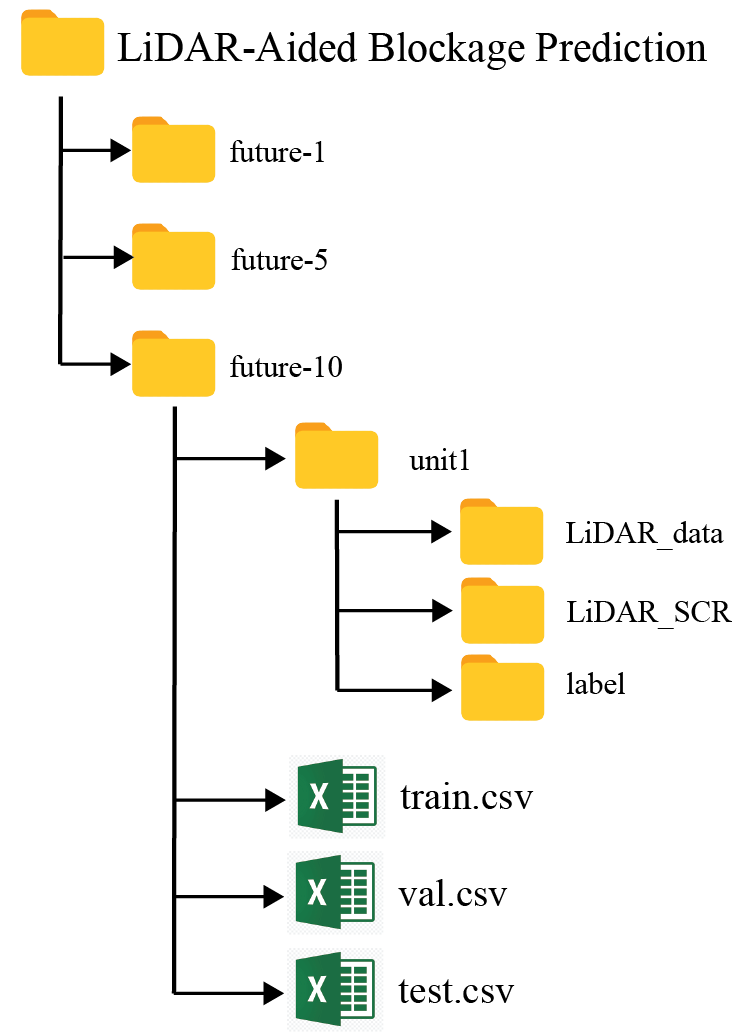
Each scenario folder consists of following files:
- unit1: Includes the LiDAR and corresponding blockage labels
- train.csv
- val.csv
- test.csv
What does each CSV file contain?
We provide the sequence of LiDAR data and the corresponding future link blockage status. An example of 5 data samples in shown below.
Individual Download Links
To download the individual scenarios, follow the scenario-wise links provided below.
Please login to download the DeepSense datasets
ML Challenge: LiDAR-Aided Blockage Prediction
To advance the state-of-the-art in the LiDAR-aided blockage prediction task, we propose a benchmark challenge based on the DeepSense real-world dataset. The objective of the task is to develop a machine learning-based model that takes the sequence of LiDAR point-cloud maps captured at the basestation as the input and predicts the future link blockage status.
This challenge adopts the labeled development dataset described above with LiDAR data and the corresponding link status.
Participation Steps
Step 1. Getting started: First, we recommend the following:
- Get familiarized with the data collection testbed and the different sensor modalities presented here
- Next, in the Tutorials page, we have provided Python-based codes to load and visualize the different data modalities
Step 4. Submission: After you develop your ML model, you are invited to submit your results at submission@DeepSense6G.net. Please find the submission process and evaluation criteria below.
Submission Process
We define a standardized beam prediction result format that serves as an input to our evaluation code. There are 5 different real-world DeepSense 6G scenarios in this challenge. For each scenario, please submit the following:
- Each scenario has three sub-dataset, each corresponding to one of the three future prediction window length, i.e., future-1, future-5 and future-10. The users must submit the predicted link blockage status for each sub-dataset in the Challenge set. An sample submission csv file is shown below.
- Every submission should provide their pre-trained models, evaluation code and ReadMe file documenting the requirements to run the code.
| sample_index | future-1 |
|---|---|
| 1 | 1 |
| 2 | 0 |
| 3 | 0 |
| 4 | 1 |
| 5 | 0 |
Evaluation
- The evaluation metric adopted in this challenge is the prediction accuracy.
- The evaluation is done based on the ML challenge (hidden) test set, which is used for benchmarking purposes.
Leaderboard Rules
- In order to participate in this challenge, please submit your results following the submission process above
- Further, to be ranked in the Leaderboard table, contestants need to submit the challenge set results for all the 6 scenarios and for all three future prediction windows.